Research on Lunar Demonstration Results of the Transformable Lunar Rover
“LEV-2” Published in Science Robotics
— Autonomous Operation Results and New Lunar Image —
June 18, 2026 (JST)
Japan Aerospace Exploration Agency
TOMY Company, Ltd.
Sony Group Corporation
Doshisha University
We are pleased to announce that a paper presenting research on the transformable lunar rover “Lunar Excursion Vehicle 2 (LEV-2),” also known as “SORA-Q,” has been featured on the cover of and published in the international journal Science Robotics on June 10, 2026 (June 11, 3:00 AM Japan Standard Time).
- Title :
- From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration
- Journal :
- Science Robotics

Key points
- ・A second lunar image has been newly released, providing evidence that LEV-2 actually traveled on the lunar surface.
- ・A unique mechanism embedded in LEV-2, which enables it to transform from a sphere (approximately 8 cm in diameter) into a mobile configuration, has demonstrated that even a palm-sized ultra-compact rover can traverse the lunar surface.
- ・Autonomous control technology has been demonstrated, enabling the rover to navigate, capture images, and transmit data without relying on ground-based remote operation.
- ・These results demonstrated the potential of low-cost, rapidly developed ultra-compact robots for future space exploration.
Overview
LEV-2 was separated from the Smart Lander for Investigating Moon (SLIM) in January 2024 and successfully reached the lunar surface. After landing, it automatically deployed and transformed from a spherical shape (approximately 8 cm in diameter) into a mobile configuration. It successfully captured images while traversing the surface and transmitted the acquired data wirelessly to the other rover LEV-1. All these operations were performed autonomously without intervention from ground control.
This study proposes mechanical design and autonomous control technology to overcome the limitations in mobility and computational capability inherent in small robots and demonstrates their effectiveness on the lunar surface.
Details
1. Background
To date, lunar and Mars exploration missions have relied on large, highly capable rovers; however, these systems have posed significant challenges in terms of development and launch cost. In contrast, small rovers offer the advantage of being deployable at lower cost, but they face substantial limitations in mobility, computational capability, and power. In particular, on soft terrain of the lunar surface, small wheels are prone to sinking, making traversal difficult. Moreover, in communication-constrained environments, autonomous capability is essential, as rovers must operate without relying on continuous ground control. Against this background, there has been a growing need for compact robots that combine high mobility and advanced autonomy.
2. Results
The following results were obtained through in-situ operations on the lunar surface. A new lunar image is also released.
- (1) Demonstration of Fully Autonomous Exploration on the Moon
After landing, LEV-2 autonomously activated, deployed its structure, stabilized its posture, and moved away from the lander while capturing images. It also selected the most valuable images and transmitted them wirelessly. These operations were designed for and carried out without reliance on ground-based control, assuming severe communication constraints.
As a result, two images were successfully acquired from the lunar surface. Figure 1 shows an image taken by the front camera. Although part of the image is missing due to data loss during transmission, it clearly captures the lander and its surroundings, providing valuable information on the landing state. Telemetry analysis confirmed that LEV-2 correctly recognized the lander using onboard image processing. Furthermore, offline image analysis indicated that the image was estimated to have been taken from a distance of approximately 5.08 meters from the lander, demonstrating that the planned motion sequence was properly executed.
Figure 2 shows an image taken by the rear camera and is newly released here. Due to communication loss, only the left portion of the image was recovered; however, it still contains important information about the lunar environment and evidence of rover mobility. Comparison with a projection image generated through image analysis (in which the front camera image is transformed to match the viewpoint of the rear camera) as described later, suggests that the lander was likely present in the missing central region. (The positions of the front and rear cameras are shown in Figure 3.)
Telemetry analysis also revealed that LEV-2 operated for at least approximately 108 minutes on the lunar surface and performed onboard image processing 240 times. In addition, the rover detected attitude anomalies during traversal and autonomously executed recovery sequences. These results demonstrate that even an ultra-small rover can autonomously conduct exploration and successfully acquire and transmit data under severe communication constraints.

(Red box indicates the detected lander on the lunar surface, demonstrating that the onboard image processing algorithm functioned correctly under lunar conditions.)

(B) Projection image generated by transforming the front camera image (Figure 1) to match the viewpoint of the rear camera.
(Common rocks are visible within the areas marked by the red boxes, and this information was used to estimate the rover’s movement and rotation. It is highly likely that the lander was located in the missing region of image A, as indicated in image B.)
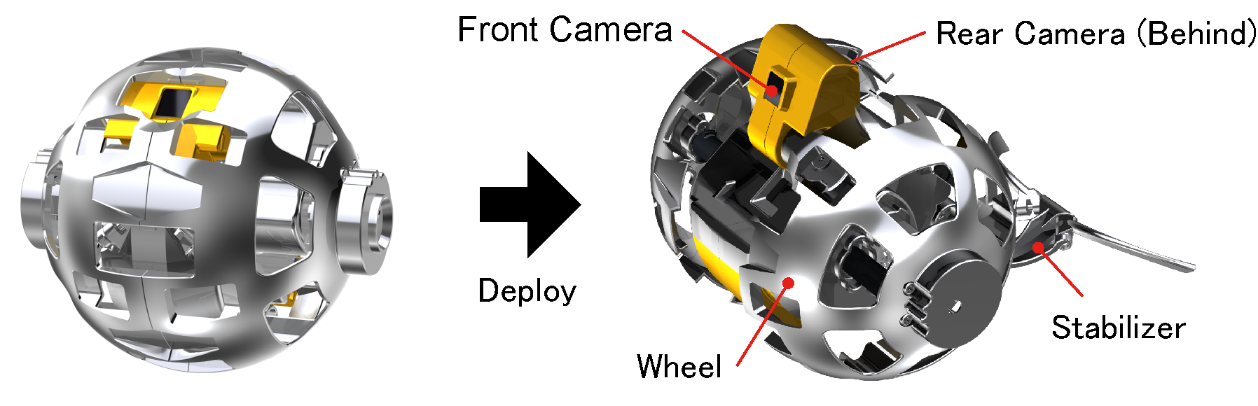
- (2) Demonstration of Mobility Using a Transformable Mechanism and an Eccentric Wheel Mechanism
LEV-2 features a unique transformable mechanism that enables it to deploy from a spherical configuration into a rover form, along with wheels incorporating an eccentric rotation mechanism designed to reduce sinking into the lunar surface. A common rock feature is visible in both captured images. Based on image analysis using this feature as a reference, it was shown that LEV-2 moved approximately 0.13 meters and rotated approximately 180 degrees between the two images. These results provide evidence that LEV-2 actually traversed and maneuvered on the lunar surface.
This demonstrates that the proposed transformation mechanism and eccentric wheel mechanism are effective in the actual lunar environment, enabling mobility even for ultra-small rovers.
- (3) Acquisition of Operational Data and Lessons Learned
During lunar operations, challenges such as communication disruptions and partial data loss were observed. Additionally, onboard anomaly detection and recovery functions were confirmed to have activated as intended, with the rover responding autonomously to anomalies.
These results provided valuable insights into consideration for system design, ground testing, and operational improvements required for deploying small robotic systems in real space environments, offering practical knowledge applicable to future exploration missions.
3. Prospects
These results represent an important step in demonstrating the feasibility of space exploration using small robotic systems. Looking ahead, the following developments are expected:
- ・Deployment of multiple small robots for efficient exploration over wide areas
- ・Realization of flexible exploration architectures combining large and small rovers
- ・Expansion of exploration to challenging environments such as caves and steep slopes, which have traditionally been difficult to access
- ・Acceleration of space exploration through low-cost and rapid mission development
The technologies and insights gained from this study are expected to contribute not only to future lunar and Mars exploration, but also to the expansion of human presence in space.
Paper Information
- Journal :
- Science Robotics
- Title :
- From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration
- 1 Space Exploration Innovation Hub Center, Japan Aerospace Exploration Agency, Japan.
- 2 Research and Development Directorate, Japan Aerospace Exploration Agency, Japan.
- 3 Exploratory Deployment Group, Sony Group Corporation, Japan.
- 4 Technology Development Division, TOMY Company, Ltd., Japan.
- 5 Faculty of Life and Medical Sciences, Doshisha University, Japan.
- 6 AI&DX Technology Division, Sony Semiconductor Solutions Corporation, Japan.
- *Author affiliation at the time of initial submission.
Related Links
- • The Transformable nano rover (Lunar Excursion Vehicle 2(LEV-2), with its nickname”SORA-Q”) for space exploration
- • Space Exploration Innovation Hub Center
-
•
The Transformable nano rover (Lunar Excursion Vehicle 2 (LEV-2), with the nickname “SORA-Q”)
This robot was jointly developed by four parties, namely JAXA, TOMY Company, Ltd., Sony Group Corporation and Doshisha University. It was launched on September 7, 2023, onboard the Small Lander for Investigating Moon (SLIM), and has succeeded in taking an image of the SLIM spacecraft that landed on the lunar surface on January 20, 2024 (JST). It is the world's smallest and lightest lunar exploration rover (78mm in diameter before transformation, 228g). LEV-2, together with the Lunar Excursion Vehicle (LEV-1), are the first Japanese lunar surface exploration rovers, and are the world's first rovers to conduct fully autonomous exploration of the lunar surface. LEV-2 and LEV-1 also performed synchronized and coordinated lunar surface exploration for the first time. (According to JAXA as of January 25, 2024)